If there are only senses and muscles, the human limbs will not move. On the one hand, because the signals from the senses have no organs to receive and process, and on the other hand, because no organs emit nerve signals, they drive the muscles to contract or relax. Similarly, if the robot has only sensors and drivers, the robotic arm will not work properly. The reason is that the signal output from the sensor does not work, and the drive motor does not get the drive voltage and current. Therefore, the robot needs to have a control system that uses hardware and software to form a control system.
The function of the robot control system is to receive the detection signal from the sensor. According to the requirements of the operation task, each motor in the robot arm is driven like our human activity depends on its own senses. The motion control of the robot cannot be separated from the sensor. The robot needs to use sensors to detect various states. The robot's internal sensor signal is used to reflect the actual motion state of the robot arm joint, and the robot's external sensor signal is used to detect changes in the working environment.
So the robot's nerves combined with the brain to form a complete robotic control system.
Robot control system concept
The robot control system refers to a management system consisting of a control subject, a control object and a control medium with its own goals and functions. The control system means that it can maintain and change any amount of interest or change in a machine, mechanism or other device in a desired manner. The control system is also implemented to bring the controlled object to a predetermined ideal state. The control system causes the controlled object to tend to a desired steady state.
Robot control system features
The control technology of the robot is developed on the basis of the control technology of the traditional mechanical system, so there is no fundamental difference between the two. But the robot control system also has a lot of special features. Its characteristics are as follows:
1. The robot control system is essentially a nonlinear system. There are many nonlinear factors in the robot, and the structure, transmission parts and driving components of the robot will cause nonlinearity of the system.
2. The robot control system is a multivariable control system composed of multiple joints, and each joint has a coupling effect. Specifically, the movement of one joint produces a dynamic effect on other joints, and each joint is subject to disturbances caused by other joint movements. Therefore, complex control techniques such as feedforward, compensation, decoupling and adaptive are often used in the control of industrial robots.
3. The robotic system is a time-varying system whose dynamic parameters change with the position of the joint movement.
4. Higher-level robots require measurement and analysis of environmental conditions and control commands, use a computer to build a huge information base, and use artificial intelligence to control, make decisions, manage and operate, and automatically select zui according to given requirements. Control the law.
Basic requirements for robot control systems
From the point of view of use, the robot is a special type of automation equipment, and its control has the following requirements:
1. Coordinated control of multi-axis motion to produce the required working trajectory. Because the movement of the hand of the robot is a synthetic movement of all joint movements, in order to move the hand according to the prescribed rules, it is necessary to control the coordination movements of the joints well, including the coordination of the motion trajectory and the motion sequence.
2, higher position accuracy, a large speed range. In addition to Cartesian robots, position sensing elements on the robot joints are usually mounted on their respective drive shafts to form a positional semi-closed loop system. In addition, due to the gap of the open chain transmission mechanism, the overall position accuracy of the robot is reduced, which is reduced by an order of magnitude compared with the numerically controlled machine tool. However, the speed range of the robot is very large, usually more than a few thousand. This is because the robot can machine the workpiece at a very low working speed during work; in the case of an empty stroke, it can move at a very high speed in order to improve efficiency.
3, the system's static rate is small, that is, the system is required to have better rigidity. This is because the robot requires smooth motion and no interference from external forces. If the static rate is large, the position error of the robot will be formed.
4, the position is not over-adjusted, dynamic response is fast. Avoid collision with the workpiece and increase the damping of the system while ensuring proper response of the system.
5. Need to use acceleration and deceleration control. Most robots have an open-chain structure, and their mechanical rigidity is very low. Excessive acceleration and deceleration will affect their smoothness. There should be acceleration and deceleration devices when starting and stopping the movement. Usually achieved by the uniform acceleration and deceleration command.
6, the speed error coefficient of each joint should be as consistent as possible. The movement of the robot arm in space is the result of joint motion of the joints, especially when it is required to move along a linear or circular arc. Even if the system has tracking error, the speed amplification factor of each axis joint servo system should be required to be as consistent as possible, and try to take a larger value without affecting the stability.
7. From the perspective of operation, the control system is required to have a good man-machine interface, so as to minimize the requirements for the operator. Therefore, in most cases, the controller designer is required to complete the design of the underlying servo controller while completing the planning algorithm, and the task description is designed to be a simple language format to be completed by the user.
8. From the perspective of system cost, it is required to reduce the hardware cost of the system as much as possible, and more software servo methods are used to improve the performance of the control system.
Functional requirements of the robot control system
1. Memory function: store job sequence, motion path, motion mode, motion speed and information related to the production process.
2, teaching function: offline programming, online teaching, indirect teaching. Online teaching includes both teaching box and instructional teaching.
3, with peripheral equipment lian system functions: input and output interfaces, communication interfaces, network interfaces, synchronization interfaces.
4, coordinate setting function: There are four coordinate systems: joint, absolute, tool, user-defined.
5, man-machine interface: teaching box, operation panel, display.
6, sensor interface: position detection, vision, touch, force and so on.
7. Position servo function: robot multi-axis linkage, motion control, speed and acceleration control, dynamic compensation, etc.
8. Fault diagnosis safety protection function: system status monitoring during operation, safety protection under fault condition and self-diagnosis of fault.
Main types of robot control systems
The task of the control system is to control the movements and functions of the robot's actuator based on the robot's job command program and the signals fed back from the sensor. If the robot does not have the information feedback feature, it is the open loop control system; if it has the information feedback feature, it is the closed loop control system.
According to the control principle, it can be divided into program control system, adaptive control system and artificial intelligence control system; according to the form of control motion, it can be divided into point control and trajectory control.
Industrial robot control system

1. Control computer: The dispatching command center of the control system.
2, teaching box: teaching robot's working track and parameter settings, as well as all human-computer interaction operations, has its own independent CPU and storage unit, and the host computer to achieve information exchange by serial communication.
3. Operation panel: It consists of various operation buttons and status indicators, and only performs basic function operations.
4, hard disk and floppy disk storage: storage peripheral memory of the robot working program.
5. Digital and analog input and output: input or output of various status and control commands.
6, printer interface: record the various information that needs to be output.
7, sensor interface: for automatic detection of information, to achieve robotic compliance control, generally for force, touch and vision sensors.
8. Axis controller: Complete the position, speed and acceleration control of each joint of the robot.
9. Auxiliary equipment control: Auxiliary equipment control for cooperation with the robot, such as the claw positioner.
10 communication interface: realize the information exchange between robot and other equipment, generally have serial interface, parallel interface and so on.
11, network interface:
1) Ethernet interface: It can realize direct PC communication of several stations or single robot through Ethernet. The data transmission rate is up to 10Mbit/s. It can directly use the Windows library function on the PC for application programming, and supports TCP/IP communication protocol. Load data and programs into each robot controller via the Ethernet interface.
2) Fieldbus interface: Supports a variety of popular fieldbus specifications, such as Devicenet, ABRemoteI/O, Interbus-s, profibus-DP, M-NET, etc.
Robot control system structure
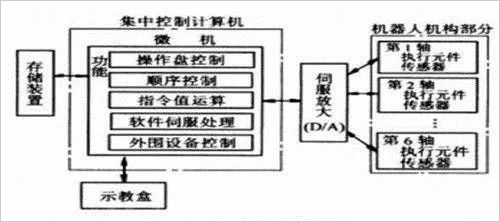
Centralized control system
The use of a computer to achieve all control functions, simple structure, low cost, but poor real-time, difficult to expand, this structure is often used in early robots, its block diagram, as shown.
PC-based centralized control system makes full use of the openness of PC resources, which can achieve good openness: multiple control cards, sensor devices, etc. can be integrated into the control through standard PCI slots or through standard serial ports and parallel ports. In the system.
The advantages of the centralized control system are: low hardware cost, easy information collection and analysis, easy to implement system's excellent control, good overall and coordination, PC-based system hardware extension is more convenient.
The shortcomings are also obvious: system control lacks flexibility, control danger is easy to concentrate, and once it fails, its impact is wide and the consequences are serious; because the real-time requirements of the robot are very high, when the system performs a large amount of data calculation, it will reduce the real-time performance of the system. The system's ability to respond to multitasking also conflicts with the real-time nature of the system; in addition, the complexity of the system connection reduces system reliability.
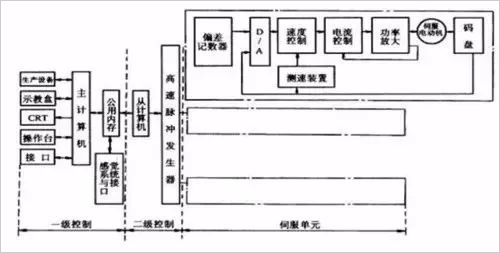
Master-slave control
The main and slave two-level processor is used to implement all the control functions of the system. The main CPU implements management, coordinate transformation, trajectory generation, and system self-diagnosis: it controls the motion of all joints from the CPU. It forms a block diagram as shown.
The master-slave control mode system has good real-time performance and is suitable for high-precision and high-speed control, but its system has poor scalability and difficult maintenance.
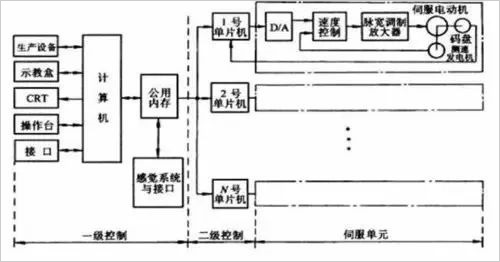
Decentralized control
The system control is divided into several modules according to the nature and mode of the system. Each module has different control tasks and control strategies. Each mode can be a master-slave relationship or an equal relationship. This method has good real-time performance, is easy to implement high-speed, high-precision control, is easy to expand, and can realize intelligent control. It is a popular method, and its control block diagram is shown in the figure.
The main idea is “decentralized control, centralized managementâ€, that is, the system can comprehensively coordinate and allocate its overall goals and tasks, and complete the control tasks through the coordination of subsystems. The whole system is functional, logical and physical. It is distributed, so it is also called distributed control system or distributed control system.
In this structure, the subsystem is composed of a controller and different controlled objects or devices, and each subsystem communicates with each other through a network or the like. The distributed control architecture provides an open, real-time, and accurate robot control system. Two-level control is often used in distributed systems.
Two-level distributed control system
It usually consists of a host computer, a lower machine, and a network. The upper computer can carry out different trajectory planning and control algorithms, and the lower computer performs research and implementation of interpolation subdivision and control optimization. The upper computer and the lower computer work in coordination with each other through the communication bus. The communication bus here can be in the form of RS-232, RS-485, EEE-488 and USB bus.
Now, the development of Ethernet and fieldbus technology provides robots with faster, more stable and more efficient communication services. Especially the field bus, it is applied to the production site, realizes two-way multi-node digital communication between the computerized measurement and control equipment, thus forming a new network integrated full distributed control system-field bus control system.
The advantages of the distributed control system are: the system flexibility is good, the risk of the control system is reduced, and the decentralized control of the multi-processor is adopted, which is beneficial to the parallel execution of the system functions, improves the processing efficiency of the system, and shortens the response time.
Robot control system classification
1. Program control system: By applying a certain regular control function to each degree of freedom, the robot can realize the required space trajectory.
2. Adaptive control system: When the external conditions change, in order to ensure the required quality or to improve the control quality by the accumulation of experience, the process is based on the observation of the state of the operating machine and the servo error, and then adjust the nonlinearity. The parameters of the model until the error disappears. The structure and parameters of such systems can be automatically changed over time and conditions.
3. Artificial intelligence system: It is impossible to compile the exercise program in advance, but it is required to determine the control effect in real time according to the obtained surrounding state information during the exercise.
4. Point-type control system: The robot is required to accurately control the pose of the end effector regardless of the path.
5. Continuous trajectory control system: The robot is required to move according to the trajectory and speed of teaching.
6, control bus: international standard bus control system. The international standard bus is used as the control bus of the control system, such as VME, MULTI-bus, STD-bus, PC-bus.
7. Custom bus control system: The bus used by the manufacturer to define the bus is used as the control system bus.
8, programming mode: physical settings programming system. The fixed limit switch is set by the operator to realize the program operation of starting and stopping, which can only be used for simple picking up and placing work.
9. Online programming: The programming process of the memory process of the operation information is completed by the teaching of the person, including the direct teaching simulation teaching and the teaching box teaching.
10, offline programming: not directly teach the actual working robot, but away from the actual working environment, teaching procedures, through the use of advanced robots, programming language, remote offline to generate the robot's work track.
Traction System,Ev Traction System,Low Speed Ev Traction,Low Voltage Ev Traction
Chengdu Huachuan Electric Parts Co., Ltd. , https://www.chcd-global.com